Aspen HYSYS: Cómo estabilizar un controlador PID en 3 sencillos pasos
Aspen HYSYS es una potente herramienta de simulación de procesos utilizada en la industria química y de petróleo y gas para modelar y optimizar sistemas de producción y operaciones. Entre las muchas funcionalidades que ofrece, se encuentra la posibilidad de simular y controlar procesos a través de controladores PID (Proporcional, Integral, Derivativo).
Aprenderás cómo utilizar Aspen HYSYS para estabilizar un controlador PID en tan solo 3 sencillos pasos. La estabilización de un controlador PID es esencial para asegurar un control preciso y estable de los procesos industriales, evitando oscilaciones y garantizando un rendimiento óptimo. Asegúrate de seguir las instrucciones detalladas y aprovecha al máximo las capacidades de Aspen HYSYS para optimizar tus operaciones.
- Cuál es la importancia de estabilizar un controlador PID en Aspen HYSYS
- Cuáles son los problemas comunes que se pueden presentar al no estabilizar un controlador PID en Aspen HYSYS
- Cuáles son los beneficios de utilizar un controlador PID en Aspen HYSYS
- Cómo funciona un controlador PID en Aspen HYSYS
- Cuáles son los parámetros que se deben ajustar en un controlador PID en Aspen HYSYS
- Cuál es la diferencia entre un controlador PID en modo automático y en modo manual en Aspen HYSYS
- Cómo se puede determinar la respuesta óptima de un controlador PID en Aspen HYSYS
- Cuáles son las técnicas avanzadas que se pueden utilizar para estabilizar un controlador PID en Aspen HYSYS
- Existe alguna alternativa al controlador PID en Aspen HYSYS
- Cuál es el tiempo promedio de estabilización de un controlador PID en Aspen HYSYS
- Cuáles son los errores más comunes al estabilizar un controlador PID en Aspen HYSYS y cómo evitarlos
- Es posible estabilizar un controlador PID en Aspen HYSYS sin experiencia previa en control de procesos
- Cuál es la relación entre la estabilización de un controlador PID en Aspen HYSYS y la eficiencia en la operación de plantas de proceso
- Preguntas frecuentes (FAQ)
Cuál es la importancia de estabilizar un controlador PID en Aspen HYSYS
La estabilización de un controlador PID en Aspen HYSYS es de suma importancia para garantizar un funcionamiento óptimo de los procesos industriales. Un controlador PID (Proporcional-Integral-Derivativo) se utiliza para regular la respuesta de un sistema ante cambios en las variables de entrada y salida.
Cuando un controlador PID está desestabilizado, puede provocar fluctuaciones indeseadas en el sistema, lo que conlleva a una pérdida de eficiencia y productividad. Además, un controlador PID inestable puede generar desgaste prematuro en los equipos y afectar la calidad de los productos finales.
Por lo tanto, estabilizar un controlador PID en Aspen HYSYS es esencial para garantizar un control preciso y estable de los procesos, minimizando las oscilaciones y asegurando un rendimiento óptimo de los equipos y sistemas industriales.
Cuáles son los problemas comunes que se pueden presentar al no estabilizar un controlador PID en Aspen HYSYS
Al utilizar Aspen HYSYS para el diseño y la simulación de procesos industriales, es común encontrarse con problemas relacionados a la estabilidad de los controladores PID. Estos problemas pueden tener un impacto significativo en el rendimiento y la eficiencia del proceso, lo que a su vez puede resultar en pérdidas económicas y operativas.
Uno de los problemas más comunes es el fenómeno conocido como "oscilaciones". Esto ocurre cuando el controlador PID no logra ajustar adecuadamente los parámetros de control, lo que resulta en fluctuaciones constantes en la salida del proceso. Estas oscilaciones pueden ser rápidas y de alta amplitud, lo que puede llevar a una operación ineficiente y a un mayor desgaste de los equipos.
Otro problema común es el "tiempo de respuesta lento". Esto ocurre cuando el controlador PID tarda demasiado tiempo en reaccionar a las variaciones en la entrada del proceso. Esto puede resultar en una respuesta inadecuada ante cambios bruscos en las condiciones de operación, lo que puede llevar a desviaciones significativas en la salida del proceso.
Además de estos problemas, también es común encontrar problemas de "interacción" entre los diferentes lazos de control en un proceso. Esto ocurre cuando los controladores PID están configurados de manera incorrecta, lo que resulta en una influencia no deseada entre los diferentes lazos de control. Esto puede llevar a un comportamiento impredecible del proceso y a una operación ineficiente.
Los problemas asociados con la falta de estabilización de los controladores PID en Aspen HYSYS pueden tener un impacto negativo en la operación de un proceso industrial. Es importante abordar estos problemas de manera adecuada y tomar medidas para estabilizar los controladores PID en Aspen HYSYS.
Cuáles son los beneficios de utilizar un controlador PID en Aspen HYSYS
Utilizar un controlador PID en Aspen HYSYS ofrece numerosos beneficios a los ingenieros y profesionales de la industria química. Un controlador PID es una herramienta esencial para estabilizar y optimizar los procesos industriales, ya que combina las tres acciones de control básicas: proporcional, integral y derivativo.
El beneficio más destacado de utilizar un controlador PID en Aspen HYSYS es la capacidad de mantener las variables de proceso dentro de los rangos deseados. Esto se logra ajustando automáticamente las acciones de control en función de las desviaciones detectadas entre el valor deseado y el valor real del proceso.
Otro beneficio importante es la capacidad de respuesta rápida del controlador PID. Aspen HYSYS permite ajustar los parámetros del controlador para lograr una estabilización rápida del proceso, lo que resulta en una mayor eficiencia operativa y una reducción de los tiempos de producción.
Además, utilizar un controlador PID en Aspen HYSYS mejora la precisión del control de los procesos industriales. La combinación de las acciones proporcional, integral y derivativo permite generar una respuesta de control más precisa, evitando oscilaciones y minimizando las desviaciones del valor deseado.
Por último, Aspen HYSYS ofrece la posibilidad de monitorear y ajustar en tiempo real los parámetros del controlador PID. Esto permite un control continuo sobre el proceso y la capacidad de adaptarse a cambios en las condiciones de operación.
Utilizar un controlador PID en Aspen HYSYS proporciona beneficios significativos, como la estabilización de variables de proceso, respuesta rápida, mayor precisión en el control y la capacidad de monitoreo y ajuste en tiempo real. Estas ventajas hacen que el controlador PID sea una herramienta fundamental en la optimización de los procesos industriales.
Cómo funciona un controlador PID en Aspen HYSYS
El controlador PID es una herramienta esencial en Aspen HYSYS para el control de procesos. El término "PID" significa Proporcional, Integral, Derivativo, que son los tres componentes del controlador.
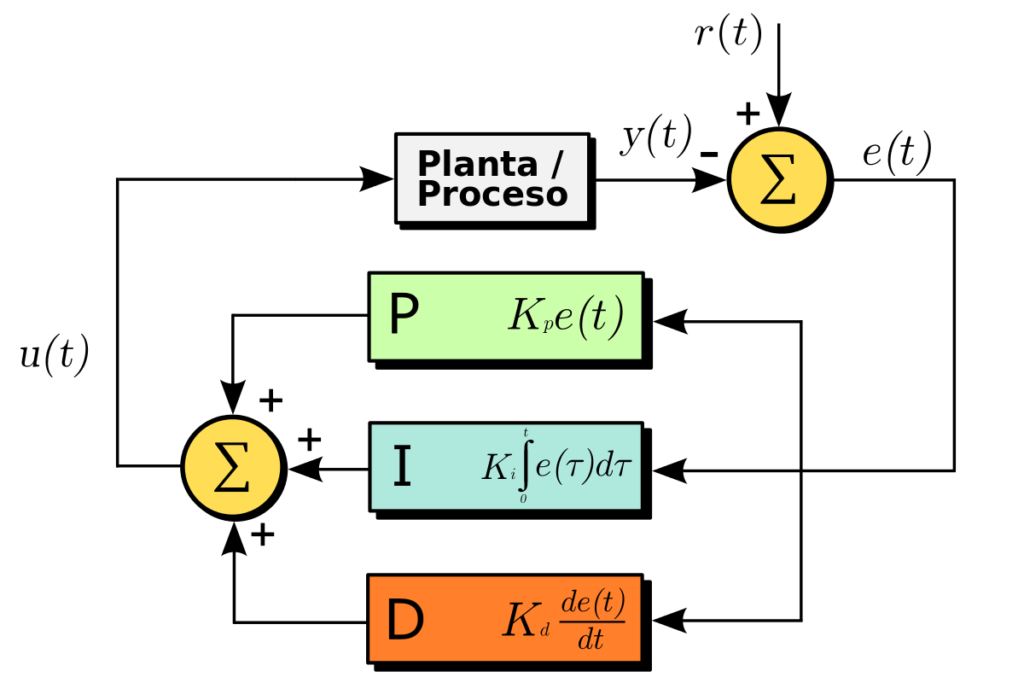
El componente proporcional (P) toma en cuenta la diferencia entre el valor medido y el valor deseado del proceso y genera una señal de control proporcional a esta diferencia. El componente integral (I) acumula y corrige los errores pasados para reducir el error en estado estacionario. El componente derivativo (D) predice y estima la tasa de cambio del error y se utiliza para estabilizar el sistema en respuesta a cambios rápidos.
En Aspen HYSYS, el controlador PID se configura ajustando los valores de las constantes proporcional, integral y derivativa. Se utilizan diversos métodos de ajuste que se basan en la respuesta en frecuencia del proceso. Estos métodos incluyen Ziegler-Nichols, Cohen-Coon y Lambda.
Una vez configurado el controlador PID en Aspen HYSYS, es importante estabilizarlo para garantizar un control efectivo del proceso. A continuación se presentan tres sencillos pasos para lograrlo.
Cuáles son los parámetros que se deben ajustar en un controlador PID en Aspen HYSYS
El controlador PID es una herramienta esencial en Aspen HYSYS para mantener la estabilidad en los procesos industriales. Sin embargo, para obtener un rendimiento óptimo, es necesario ajustar correctamente sus parámetros. En esta sección, te guiaré a través de los 3 pasos sencillos que debes seguir para estabilizar un controlador PID en Aspen HYSYS.
Paso 1: Establecer el valor de la constante proporcional (KP)
La constante proporcional (KP) determina la fuerza con la que el controlador responde a las desviaciones del valor de referencia. Un valor demasiado alto puede hacer que el sistema sea inestable, mientras que un valor demasiado bajo puede causar una respuesta lenta. Para ajustar KP, es recomendable comenzar con un valor bajo y aumentarlo gradualmente hasta que el sistema se estabilice.
Paso 2: Ajustar la constante integral (KI)
La constante integral (KI) es responsable de corregir los errores acumulados en el sistema. Un valor alto de KI puede provocar oscilaciones excesivas, mientras que un valor bajo puede causar una respuesta lenta. Para ajustar KI, se recomienda comenzar con un valor bajo y aumentarlo gradualmente hasta que el sistema alcance la estabilidad deseada.
Paso 3: Configurar la constante derivativa (KD)
La constante derivativa (KD) ayuda a compensar las variaciones rápidas en el sistema. Un valor alto de KD puede hacer que el sistema sea demasiado sensible a las perturbaciones, mientras que un valor bajo puede generar una respuesta lenta. Para ajustar KD, se sugiere empezar con un valor bajo y aumentarlo gradualmente hasta que se logre un equilibrio entre la respuesta rápida y la estabilidad.
La estabilización de un controlador PID en Aspen HYSYS requiere ajustar los parámetros KP, KI y KD. Recuerda comenzar con valores bajos y aumentarlos gradualmente hasta obtener la respuesta deseada. Con estos 3 sencillos pasos, podrás mejorar el rendimiento de tu sistema y garantizar la estabilidad en tus procesos industriales.
Cuál es la diferencia entre un controlador PID en modo automático y en modo manual en Aspen HYSYS
En Aspen HYSYS, los controladores proporcionan una herramienta eficiente para mantener las variables de proceso dentro de los límites establecidos. Uno de los controladores más comúnmente utilizados es el controlador PID (Proporcional, Integral y Derivativo). En Aspen HYSYS, los controladores PID se pueden configurar en dos modos: automático y manual.
En el modo automático, el controlador PID utiliza las señales de entrada y salida para calcular y ajustar automáticamente el valor de la variable de proceso. Esto permite que el controlador mantenga la variable de proceso lo más cerca posible del valor deseado, minimizando las desviaciones. En contraste, en el modo manual, el controlador PID no realiza ningún cálculo automático y el usuario debe ajustar manualmente los valores del controlador.
El modo automático es especialmente útil cuando se necesita un control continuo y preciso de la variable de proceso, ya que el controlador ajusta automáticamente los parámetros PID en función de las señales de entrada y salida. Por otro lado, el modo manual puede ser útil en situaciones donde el controlador necesita ser ajustado de forma rápida y precisa por el operador, como en escenarios de emergencia o durante la puesta en marcha inicial del proceso.
La diferencia fundamental entre el controlador PID en modo automático y en modo manual en Aspen HYSYS radica en el cálculo y ajuste automático de los parámetros del controlador. La elección del modo adecuado depende de las necesidades específicas del proceso y las preferencias del operador.
Cómo se puede determinar la respuesta óptima de un controlador PID en Aspen HYSYS
Para determinar la respuesta óptima de un controlador PID en Aspen HYSYS, es importante seguir estos 3 sencillos pasos:
Paso 1: Configurar el controlador PID
En primer lugar, debemos configurar el controlador PID en Aspen HYSYS. Esto implica ajustar los parámetros Kp, Ki y Kd del controlador para obtener la respuesta deseada. Es importante tener en cuenta las características específicas del sistema en el que se está trabajando, como la dinámica del proceso y los requisitos de estabilidad.
El parámetro Kp, también conocido como ganancia proporcional, determina la influencia de la señal de error en la salida del controlador. Si se aumenta demasiado, puede provocar una respuesta excesiva y oscilaciones. Por otro lado, si se disminuye demasiado, la respuesta puede ser muy lenta o incluso inexistente.
El parámetro Ki, o ganancia integral, controla la capacidad del controlador para eliminar el error acumulado a lo largo del tiempo. Un valor alto puede causar oscilaciones, mientras que uno bajo puede hacer que el controlador se demore en la eliminación del error.
Por último, el parámetro Kd, conocido como ganancia derivativa, se utiliza para anticipar las tendencias en el error y compensarlas. Si se establece demasiado alto, puede hacer que el controlador sea sensible al ruido y a las fluctuaciones, mientras que un valor bajo puede resultar en una respuesta lenta o inestable.
Paso 2: Sintonizar el controlador PID
Una vez que se han configurado los parámetros del controlador PID, es importante sintonizarlo para obtener la respuesta óptima. Aspen HYSYS ofrece diferentes métodos de sintonización, como el método de Ziegler-Nichols o el método de Cohen-Coon.
El método de Ziegler-Nichols es un método basado en la prueba y error que implica aumentar el parámetro Kp hasta que se produzcan oscilaciones sostenidas, y luego calcular los valores de Ki y Kd basados en la ganancia crítica y el período crítico de las oscilaciones.
El método de Cohen-Coon, por otro lado, es una aproximación basada en la respuesta al escalón del sistema. Implica realizar una prueba de escalón y luego calcular los valores de Kp, Ti y Td según la ganancia máxima, el tiempo de subida y el tiempo pico del sistema.
La elección del método de sintonización dependerá de las características específicas del sistema y las preferencias del usuario.
Paso 3: Verificar y ajustar el controlador PID
Una vez que se ha configurado y sintonizado el controlador PID, es importante verificar su desempeño y realizar ajustes si es necesario. Aspen HYSYS ofrece herramientas de análisis y simulación para evaluar la respuesta del controlador en diferentes condiciones de operación.
Es recomendable realizar pruebas utilizando diferentes setpoints y perturbaciones para verificar la estabilidad del controlador y su capacidad para seguir las consignas de manera precisa. Si se observan problemas de estabilidad o desempeño, se pueden realizar ajustes adicionales a los parámetros del controlador y repetir las pruebas hasta obtener los resultados deseados.
Determinar la respuesta óptima de un controlador PID en Aspen HYSYS implica configurar, sintonizar, verificar y ajustar el controlador de acuerdo a las características del sistema y los requisitos de operación. Siguiendo estos 3 sencillos pasos, es posible lograr un control eficiente y estable en cualquier proceso.
Cuáles son las técnicas avanzadas que se pueden utilizar para estabilizar un controlador PID en Aspen HYSYS
Aspen HYSYS es una herramienta de simulación de procesos ampliamente utilizada en la industria química y de petróleo y gas. Una de las tareas más comunes en el diseño y operación de plantas químicas es el control de procesos mediante controladores PID (Proporcional, Integral, Derivativo).
Técnica 1: Ajuste de los parámetros del controlador
El primer paso para estabilizar un controlador PID en Aspen HYSYS es ajustar sus parámetros. Esto se hace mediante el análisis y ajuste de los valores de ganancia, tiempo integral y tiempo derivativo del controlador. Estos parámetros determinan la respuesta del controlador a las perturbaciones del proceso.
En Aspen HYSYS, se pueden utilizar diferentes métodos para ajustar los parámetros del controlador, como el método de Ziegler-Nichols. Este método implica realizar experimentos en el sistema y analizar la respuesta del controlador a diferentes tipos de perturbaciones. En función de los resultados, se pueden ajustar los parámetros del controlador para lograr una respuesta estable y rápida.
Técnica 2: Uso de restricciones en el controlador
Además del ajuste de los parámetros del controlador, otra técnica que se puede utilizar para estabilizar un controlador PID en Aspen HYSYS es el uso de restricciones. Las restricciones permiten limitar la salida del controlador dentro de un rango deseado.
En Aspen HYSYS, se pueden configurar restricciones en el controlador para evitar que la salida se salga de los límites establecidos. Esto es especialmente útil cuando se trabaja con procesos que tienen restricciones físicas, como temperaturas o presiones máximas y mínimas.
Técnica 3: Utilización de filtros en el controlador
Por último, una técnica adicional que se puede aplicar para estabilizar un controlador PID en Aspen HYSYS es el uso de filtros. Los filtros ayudan a suavizar la respuesta del controlador, evitando oscilaciones indeseadas y reduciendo el tiempo de estabilización.
En Aspen HYSYS, se pueden agregar filtros a los controladores PID para ajustar la forma de la respuesta. Estos filtros se aplican a la señal de error antes de ingresar al controlador, lo que permite mejorar la estabilidad y desempeño del sistema de control.
Aspen HYSYS ofrece diferentes técnicas avanzadas para estabilizar un controlador PID. Mediante el ajuste de los parámetros del controlador, el uso de restricciones y la aplicación de filtros, es posible lograr una respuesta estable y rápida en el control de procesos.
Existe alguna alternativa al controlador PID en Aspen HYSYS
Aspen HYSYS es una poderosa herramienta de simulación de procesos ampliamente utilizada en la industria química y de petróleo y gas. Una de las características clave de Aspen HYSYS es su capacidad para implementar controladores PID (Proporcional, Integral, Derivativo) para estabilizar y controlar los procesos.
El controlador PID es ampliamente utilizado debido a su simplicidad y eficiencia en la estabilización de procesos. Sin embargo, en ocasiones puede ser necesario explorar alternativas al controlador PID para obtener un mejor rendimiento y una mayor precisión en el control de procesos en Aspen HYSYS.
Una posible alternativa al controlador PID en Aspen HYSYS es el controlador de retroalimentación de estado, también conocido como controlador LQR (Linear Quadratic Regulator). Este controlador utiliza técnicas de control óptimo para ajustar el comportamiento del sistema mediante la minimización de una función de costo cuadrático.
Otra alternativa es el controlador de modelo predictivo, que utiliza modelos matemáticos del proceso para predecir su comportamiento futuro y ajustar la acción de control en función de esas predicciones. Este enfoque permite una respuesta más rápida y precisa en comparación con el controlador PID tradicional.
Además, Aspen HYSYS también ofrece la posibilidad de implementar controladores avanzados como el controlador adaptativo o el controlador fuzzy. Estos controladores utilizan algoritmos más complejos y sofisticados para adaptarse y ajustar el control en tiempo real, lo que puede conducir a un control más preciso y robusto en situaciones donde el proceso es altamente no lineal o variable.
Aunque el controlador PID es un método comúnmente utilizado y eficaz para estabilizar procesos en Aspen HYSYS, existen alternativas más avanzadas y sofisticadas que pueden proporcionar un mejor rendimiento y una mayor precisión en el control de procesos. La elección de la alternativa adecuada dependerá de las características específicas del proceso y los objetivos de control deseados.
Cuál es el tiempo promedio de estabilización de un controlador PID en Aspen HYSYS
En Aspen HYSYS, el tiempo promedio de estabilización de un controlador PID puede variar dependiendo de varios factores. Estos incluyen la complejidad del sistema de control, la respuesta del proceso y la configuración inicial del controlador.
En general, el objetivo de estabilizar un controlador PID es reducir la variabilidad y asegurar que la salida del controlador se mantenga cerca del valor de consigna deseado. Para lograr esto, es importante seguir algunos pasos clave.
Paso 1: Ajustar los parámetros del controlador inicialmente
El primer paso para estabilizar un controlador PID en Aspen HYSYS es ajustar los parámetros iniciales del controlador. Esto implica ajustar el valor de la constante proporcional (KP), la constante integral (KI) y la constante derivativa (KD).
Es importante recordar que estos parámetros pueden variar según las características del sistema y la respuesta del proceso. Por lo tanto, es recomendable realizar pruebas y ajustes iterativos hasta encontrar los valores óptimos.
Paso 2: Realizar pruebas de respuesta al escalón
Una vez ajustados los parámetros iniciales del controlador, es necesario realizar pruebas de respuesta al escalón para evaluar la estabilidad y la respuesta del sistema. Esto implica introducir un cambio en la variable controlada y observar la respuesta del controlador.
En Aspen HYSYS, se pueden realizar pruebas de respuesta al escalón utilizando el simulador de procesos. Esto permitirá ajustar aún más los parámetros del controlador para optimizar la estabilización.
Paso 3: Optimizar los parámetros del controlador
Una vez realizadas las pruebas de respuesta al escalón, es necesario optimizar los parámetros del controlador para lograr una estabilización óptima.
En Aspen HYSYS, se pueden utilizar técnicas de optimización como el método del gradiente o el método de la partición para ajustar los parámetros del controlador y lograr una respuesta estable y precisa.
Es importante destacar que el tiempo de estabilización de un controlador PID puede variar dependiendo de la complejidad del sistema y la configuración inicial del controlador. Sin embargo, siguiendo estos pasos y optimizando los parámetros del controlador, es posible lograr una estabilización efectiva en Aspen HYSYS.
Cuáles son los errores más comunes al estabilizar un controlador PID en Aspen HYSYS y cómo evitarlos
Estabilizar un controlador PID en Aspen HYSYS puede ser un desafío para muchos ingenieros. Los errores más comunes que se cometen al intentar estabilizar un controlador PID son la falta de comprensión del proceso, la elección incorrecta de los parámetros y la falta de ajuste fino.
Falta de comprensión del proceso
Antes de intentar estabilizar un controlador PID en Aspen HYSYS, es fundamental tener un conocimiento profundo del proceso que se está controlando. Esto incluye comprender las variables de entrada y salida, la dinámica del proceso y las limitaciones físicas.
Una vez que se comprende el proceso, se puede proceder a configurar el controlador PID de manera más efectiva.
Elección incorrecta de los parámetros
La elección de los parámetros del controlador PID es crucial para lograr una estabilización exitosa. Los parámetros incluyen la ganancia proporcional (KP), el tiempo integral (TI) y el tiempo derivativo (TD).
Es importante tener en cuenta que estos parámetros pueden variar dependiendo de las características del proceso, como la inercia, la respuesta transitoria y la frecuencia natural. Una elección incorrecta de los parámetros puede resultar en un control ineficiente o incluso en una inestabilidad del sistema.
Falta de ajuste fino
Incluso después de elegir los parámetros adecuados, es común que se requiera un ajuste fino para lograr una estabilización óptima del controlador PID en Aspen HYSYS. Esto implica realizar pruebas y ajustar los parámetros según los resultados obtenidos.
El ajuste fino puede incluir la modificación de la ganancia proporcional para mejorar la respuesta transitoria, la modificación del tiempo integral para reducir el error en estado estacionario y la modificación del tiempo derivativo para mejorar la estabilidad.
Es importante recordar que el ajuste fino puede ser un proceso iterativo y puede requerir paciencia y experiencia para lograr los resultados deseados.
Para estabilizar un controlador PID en Aspen HYSYS, es necesario comprender el proceso, elegir los parámetros adecuados y realizar un ajuste fino. Evitar los errores comunes, como la falta de comprensión del proceso, la elección incorrecta de los parámetros y la falta de ajuste fino, puede ayudar a lograr una estabilización exitosa del controlador PID.
Es posible estabilizar un controlador PID en Aspen HYSYS sin experiencia previa en control de procesos
El controlador Proporcional, Integral y Derivativo (PID) es una herramienta ampliamente utilizada en la industria para el control de procesos. Aspen HYSYS, un software de simulación de procesos líder en la industria, ofrece una solución fácil de usar para estabilizar un controlador PID sin la necesidad de tener experiencia previa en control de procesos.
Paso 1: Configuración básica del controlador PID
El primer paso para estabilizar un controlador PID en Aspen HYSYS es realizar una configuración básica. En la ventana de configuración del controlador PID, se debe ingresar el rango de operación del controlador, los límites de salida y las ganancias proporcionales, integrales y derivativas.
Es importante ajustar correctamente las ganancias proporcionales, integrales y derivativas para asegurar un control estable del proceso. Aspen HYSYS proporciona guías y recomendaciones para ayudar en este proceso. Además, se pueden realizar ajustes finos al observar la respuesta del proceso en tiempo real.
Paso 2: Sintonización del controlador PID
Una vez realizada la configuración básica del controlador PID, el siguiente paso es la sintonización del controlador. Aspen HYSYS ofrece diferentes métodos de sintonización, como el método de Ziegler-Nichols, que permite obtener los parámetros óptimos del controlador para lograr una respuesta estable y rápida del proceso.
La sintonización del controlador PID implica ajustar las ganancias proporcionales, integrales y derivativas para optimizar el rendimiento del controlador y minimizar el error en el proceso. Aspen HYSYS proporciona herramientas y gráficos interactivos para facilitar este proceso.
Paso 3: Validación y ajuste final del controlador PID
Una vez que se ha realizado la sintonización del controlador PID, es importante validar su desempeño. Aspen HYSYS proporciona herramientas de análisis y visualización de datos en tiempo real para evaluar el desempeño del controlador en diferentes escenarios de operación.
Se recomienda realizar pruebas en condiciones reales o simuladas para validar y ajustar el controlador PID. Al observar y analizar los datos de respuesta del proceso, se pueden hacer ajustes finos a las ganancias del controlador para lograr una estabilidad óptima y mejorar el rendimiento del proceso.
Estabilizar un controlador PID en Aspen HYSYS es un proceso sencillo que se puede realizar siguiendo estos 3 pasos. Con su interfaz intuitiva y herramientas de sintonización y análisis, Aspen HYSYS hace que el control de procesos sea accesible incluso para aquellos sin experiencia previa en control de procesos.
Cuál es la relación entre la estabilización de un controlador PID en Aspen HYSYS y la eficiencia en la operación de plantas de proceso
La estabilización de un controlador PID en Aspen HYSYS juega un papel fundamental en la eficiencia operativa de las plantas de proceso. Un controlador PID, o controlador proporcional-integral-derivativo, es un sistema de control ampliamente utilizado en la industria para mantener variables de proceso, como la temperatura y la presión, en un rango deseado.
La estabilización de un controlador PID implica ajustar los parámetros del controlador para garantizar una respuesta controlada y estable del proceso. Si un controlador no está correctamente ajustado, puede generar oscilaciones, sobrecorrecciones y retrasos en la respuesta del proceso.
Una operación eficiente de las plantas de proceso depende de un controlador PID bien ajustado que permita mantener las variables de proceso dentro de los límites establecidos. Esto no solo garantiza la calidad del producto final, sino que también evita costosos desperdicios y reduce el consumo de energía.
Paso 1: Análisis de la respuesta del proceso
El primer paso para estabilizar un controlador PID en Aspen HYSYS es realizar un análisis de la respuesta del proceso. Esto implica recopilar datos de la planta, como las lecturas de las variables de proceso y las señales de entrada y salida del controlador.
Utilizando herramientas de análisis disponibles en Aspen HYSYS, como gráficas y registros de datos, se pueden identificar patrones de respuesta del proceso, como oscilaciones, sobrecorrecciones o retrasos. Estos patrones proporcionan información valiosa sobre el comportamiento del proceso y ayudan a determinar qué ajustes son necesarios en el controlador PID.
Paso 2: Ajuste de los parámetros del controlador
Una vez realizado el análisis de la respuesta del proceso, el siguiente paso es ajustar los parámetros del controlador. Estos parámetros incluyen la ganancia proporcional, la constante integral y la constante derivativa.
Aspen HYSYS ofrece diferentes métodos para ajustar los parámetros del controlador PID, como el método de ajuste de Ziegler-Nichols o el método de ajuste de Cohen-Coon. Estos métodos permiten determinar los valores óptimos de los parámetros del controlador para lograr una respuesta controlada y estable del proceso.
Paso 3: Validación y seguimiento del controlador PID
Una vez realizados los ajustes en los parámetros del controlador PID, es importante validar y seguir de cerca el desempeño del controlador en el proceso. Esto implica monitorear las variables de proceso y compararlas con los límites establecidos, así como analizar las tendencias de las señales de entrada y salida del controlador.
En Aspen HYSYS, se pueden utilizar diferentes herramientas de monitoreo, como gráficas en tiempo real y registros de datos, para evaluar el desempeño del controlador PID y realizar ajustes adicionales si es necesario. La validación y el seguimiento continuo garantizan que el controlador esté operando de manera eficiente y estable, lo que se traduce en una operación óptima de la planta de proceso.
La estabilización de un controlador PID en Aspen HYSYS es fundamental para lograr una operación eficiente de las plantas de proceso. Mediante un análisis de la respuesta del proceso, el ajuste de los parámetros del controlador y la validación continua, es posible garantizar una respuesta controlada y estable del proceso, lo que resulta en un mejor aprovechamiento de los recursos y una mayor eficiencia en la operación de las plantas de proceso.
Preguntas frecuentes (FAQ)
1. ¿Qué es un controlador PID?
Un controlador PID es un algoritmo utilizado en sistemas de control automático para regular el comportamiento de un proceso. Combina tres términos -Proporcional (P), Integral (I) y Derivativo (D)- para mejorar la respuesta del sistema.
2. ¿Cómo puedo estabilizar un controlador PID en Aspen HYSYS?
En Aspen HYSYS, puedes estabilizar un controlador PID siguiendo estos pasos: 1) Ajusta el término Proporcional (Kp) para obtener una respuesta rápida pero estable; 2) Ajusta el término Integral (Ki) para eliminar cualquier error en estado estacionario; 3) Ajusta el término Derivativo (Kd) para mejorar la respuesta del sistema a cambios rápidos.
3. ¿Qué debo hacer si mi controlador PID no se estabiliza?
Si tu controlador PID no se estabiliza, asegúrate de revisar los valores de los términos de ajuste (Kp, Ki, Kd) y realiza ajustes incrementales hasta obtener la respuesta deseada. También puedes revisar la configuración del proceso y asegurarte de que esté bien definida.
4. ¿Cuál es la importancia de estabilizar un controlador PID?
Estabilizar un controlador PID es crucial para garantizar un control preciso y estable de un proceso. Un controlador no estabilizado puede llevar a oscilaciones, errores en estado estacionario y respuestas inadecuadas a perturbaciones.
5. ¿Hay alguna técnica especial para estabilizar un controlador PID en Aspen HYSYS?
Si bien no hay una técnica especial, es recomendable realizar ajustes incrementales y observar el comportamiento del sistema en cada etapa. Además, puedes utilizar herramientas de análisis y simulación en Aspen HYSYS para evaluar el desempeño del controlador y realizar mejoras si es necesario.
Deja una respuesta
Entradas relacionadas